







Naujoji sistema, pateikta žurnale „Science Advances“, yra įkvėpta biologinių principų. Gyvuose organizmuose modulinė struktūra leidžia naudoti ir perdirbti tuos pačius komponentus – amino rūgštis, ląsteles – atsinaujinimui, augimui ir prisitaikymui.

Kolumbijos universiteto profesoriaus Chodo Lipsoono nuomone, būtent tokia modulinė struktūra ir savarankiškumo gebėjimas leido gyviems organizmams tapti tokiais lanksčiais. Perkėlus šį principą į robotiką, mašinos galės ne tik priimti sprendimus, bet ir palaikyti savo fizinį gyvybingumą – analogiškai metabolizmui gyvuose organizmuose.
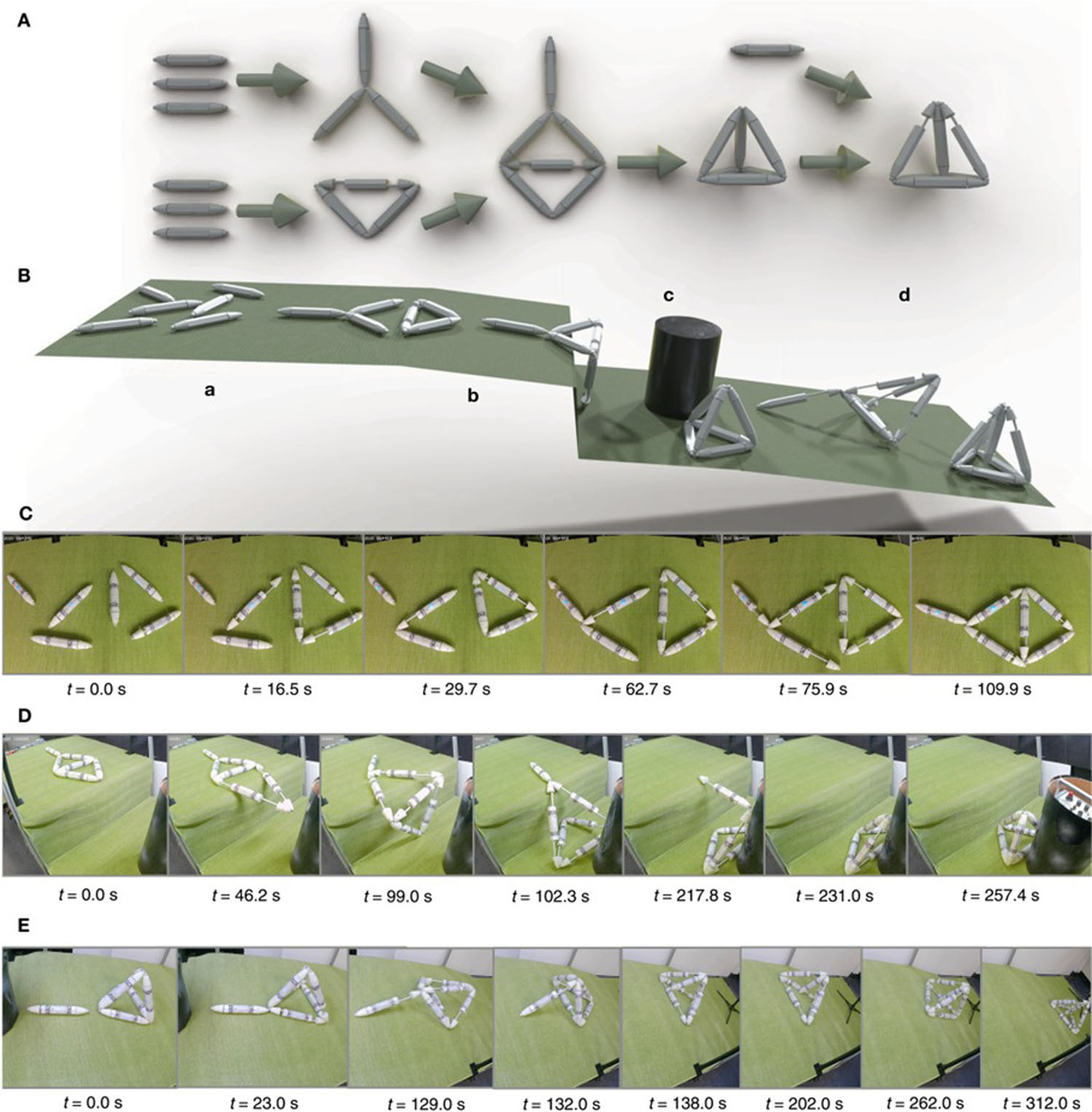
Pagrindinis kūrimo elementas tapo Truss Link sistema – magnetinis modulis, išoriškai primenantis žaislą Geomag.
Šie kompaktiški grandiniai gali būti sujungiami tarpusavyje įvairiais kampais, sudarant sudėtingas konstrukcijas. Dėl savo paprastumo ir universalumo jie leidžia surinkti dvimatės formos konstrukcijas, kurios vėliau transformuojasi į trimačius robotus.
Veikimo principas buvo patvirtintas praktiškai: vienas iš sukurtų tetraedrinių robotų „išaugino“ papildomą elementą – atramą, dėl kurios judėjimo greitis nuožulniu paviršiumi padidėjo 66,5 %.
Tyrimo duomenimis, robotai su metabolizmu galės surinkti arba atrinkti tinkamus modulius – tiek iš savo aplinkos, tiek iš kitų mašinų.
Tai sudaro sąlygas atsirasti savarankiškoms sistemoms, nepriklausomoms nuo nuolatinės techninės priežiūros.
Kaip pažymėjo pagrindinis projekto autorius Philipp Martin Weider, tikros autonomijos sąlygomis nepakanka vien kognityvinės nepriklausomybės – mašina turi būti fiziškai stabili ir gebėti prisitaikyti realiuoju laiku. Tai ypač aktualu aplinkose, kur nėra žmonių: nuniokotose zonose, kitose planetose, jūros gelmėse ar ekstremaliose situacijose.
Tyrimas buvo atliktas „Creative Machines“ laboratorijoje, kurioje jau seniai kuriamos technologijos, galinčios įveikti tradicinių robotų fizinius apribojimus. Pasak Lipson, AI jau seniai išmoko mąstyti, mokytis ir prisitaikyti skaitmeninėje erdvėje. Tačiau fizinis kūnas lieka silpnoji vieta.
Tai aktualizuoja sąsajų, leidžiančių dirbtiniam intelektui pasireikšti ne tik veiksmais, bet ir per pačią materiją, kūrimą. Mašinos galės pačios formuoti savo kūną pagal užduotį – priklausomai nuo to, ko reikia: plaukti, skristi, ropinėti ar lipti per nelygų reljefą.
Perspektyvoje tyrėjų komanda mato ateitį, kurioje robotai sudaro „ekosistemą“, kurioje vienos mašinos tarnauja kaip išteklių bazė kitoms. Tai sudaro galimybę kolektyvinės adaptacijos ir fizinės kooperacijos plėtrai be išorinės pagalbos. Tokios sistemos gali ne tik spręsti naujas užduotis, bet ir sugalvoti savo būdus joms spręsti keičiant struktūrą.
Priešingai nei plačiai paplitusi fantazija, kol kas nekalbama apie savaime dauginančias mašinas, kaip mokslinėje fantastikoje. Kalbama apie praktinį žingsnį link fizinės autonomijos – žingsnį, be kurio sunku įsivaizduoti ateities robotus, dirbančius atokiose ar pavojingose sąlygose.
Perėjimas nuo griežtų mašinų prie prisitaikančių organizmams panašių sistemų tampa ne teorine prabanga, o inžinerine būtinybe, kai užduotys plečiasi, o žmogaus dalyvavimas ribotas.



Šiuo metu skaitomiausi






Taip pat skaitykite





















Rašyti komentarą